


Iránytű-interferencia Mavic Pro-n
Bognár András – 2017. május 24. – Egy hozzászólás
Mavic Pro tulajdonosok gyakran tapasztalják, hogy drónjuk egyik pillanatról a másikra átvált Pozícionáló módból Attitűd módba, hiába van 10 vagy még több GPS műhold a láthatáron. Ilyenkor a Mavic-et elkezdi sodorni a légmozgás, és bizony koncentrálni kell ahhoz, hogy manuális ellenirányítással a jó helyre vezessük drónunkat, és ne ütközzünk véletlenül neki egy tereptárgynak.
Eleinte nem értettük, hogy lehet az, hogy ilyen sok műholdat lát a Mavic, és mégsem tudja magát egy helyben lebegtetni, a saját GPS koordinátáit alapul véve, korrigálva a széllökéseket? Aztán kicsit utánaolvastunk, és megtaláltuk a megoldást a mavicpilots.com fórumán. Cikkünket is az ott olvasottak ihlették, és arra gondoltunk, hogy a magyar drónos közösséggel is megosztjuk tapasztalatainkat.
Hogyan működik?
A Mavic az egy helyben lebegéshez elsősorban a GPS modultól kapott koordinátákat, az iránytűktől kapott irányultsági információt és más szenzoraitól (kamerák, barométer, ultrahang) kapott információkat használja. Ezek közül a két legfontosabb a földrajzi pozíció és az irányultság. Ha bármelyik hiányzik, a drón átvált Atti módba, ami annyit tesz, hogy kézi irányítással kell egy helyben tartani. Változó irányú szélben ez már komoly nehézséget jelenthet egy kezdő pilótának, és ha még tereptárgyak is vannak a közelben, akkor szinte garantált az ütközés.
Animáció a régi és új változat különbségének szemléltetésére
A Mavic-ben két iránytűegység van, biztonsági okokból kifolyólag. Egyik elől, a két előnézeti kamera között található, a másik a drón farában a GPS modullal egybeépítve. A problémát az okozza, hogy míg az első iránytű közelében nincsenek viszonylag erős áramot vezető vezetékek, addig a hátsó iránytű sajnos nincs ilyen szerencsés helyzetben. A hátsó iránytűmodul alatt ugyanis épp a két hátsó motor vezetékei futnak, amiken az átfolyó áram elektromágneses interferenciát képes kelteni az iránytűmodulban. Egy erős előremenet és egyszerre emelkedés esetén a vezetékekben folyó áram meghaladhatja a 20 ampert is, ami „kitéríti” az iránytűmodul érzékelt irányultságát, ilyenkor a drón inkább átkapcsol kézi vezérlésre, minthogy a téves információkra támaszkodva össze-vissza forogjon.
A megoldás
A megoldás a fórumozók elmondásai alapján az, hogy a két hátsó motorhoz vezető kábelcsoportot 3-4-szer meg kell csavarni, így a bennük gerjedő mágneses erőtér jóval kevesebb hatással lesz az iránytűmodulra, ami továbbra is helytálló irányultsági információt fog adni a drón repülésvezérlő elektronikájának.
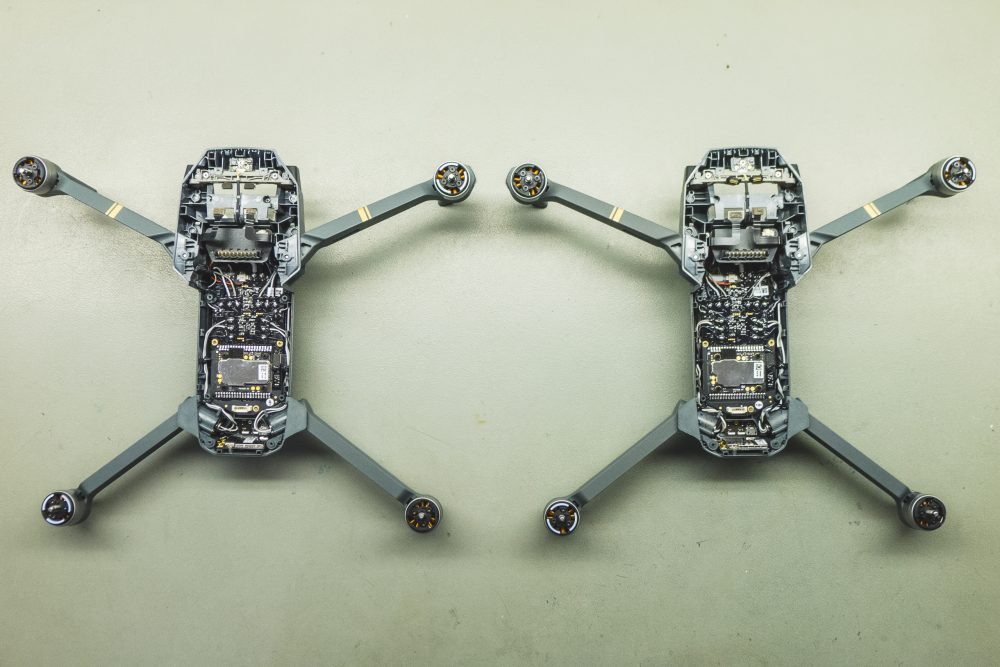
Bal oldalon a régi, egyenes változat, jobb oldalon az új, csavart változat
A fentebb leírt hibajelenség főként a korai gyártású (2016 év végi) Mavic-eket érinti. Újabb példányokban már gyárilag elvégzik a kábelek tekerését, így ezek a drónok ritkábban veszítik el pozíciójukat és váltanak át Atti módba.
Mavic Pro kábelcsavarás
A saját drónunkon is tapasztaltuk a Compass Interference kifejezéssel is illetett hibát, és mivel 2016 év végén gyártották, szinte biztosak voltunk benne, hogy a hátsó kábelezésünk még nem az újabb, tekert változat. Ennek megállapításához a drón felső burkolatát kellett leszednünk. Ez már gyorsan ment, hiszen jópár Mavic-hez volt már szerencsénk az utóbbi fél évben.
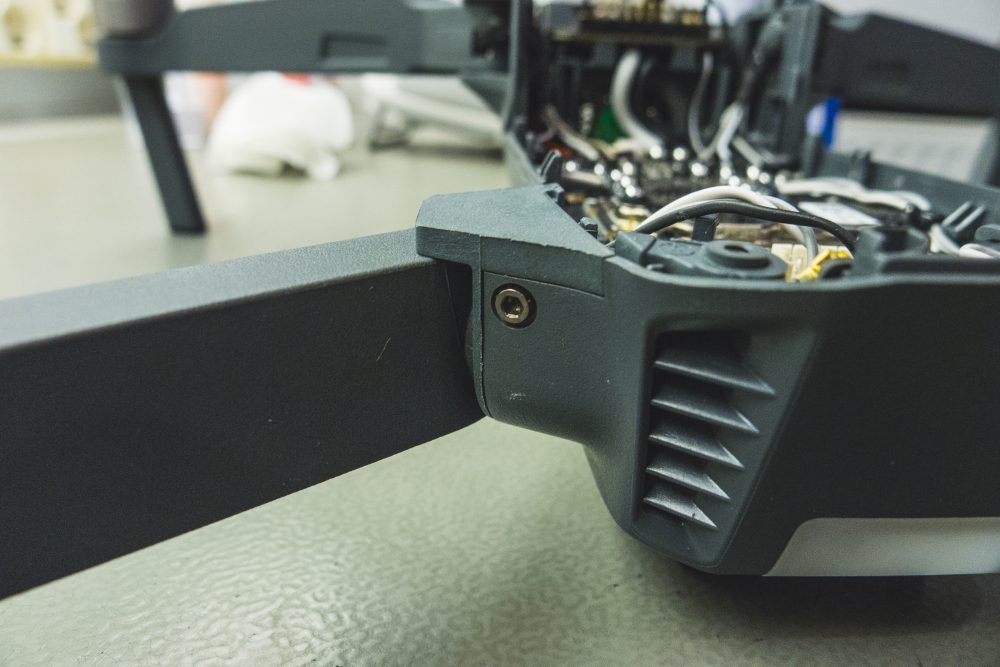
Ez a külső csavar is a lábat rögzíti
Két belső csavar rögzíti a lábat
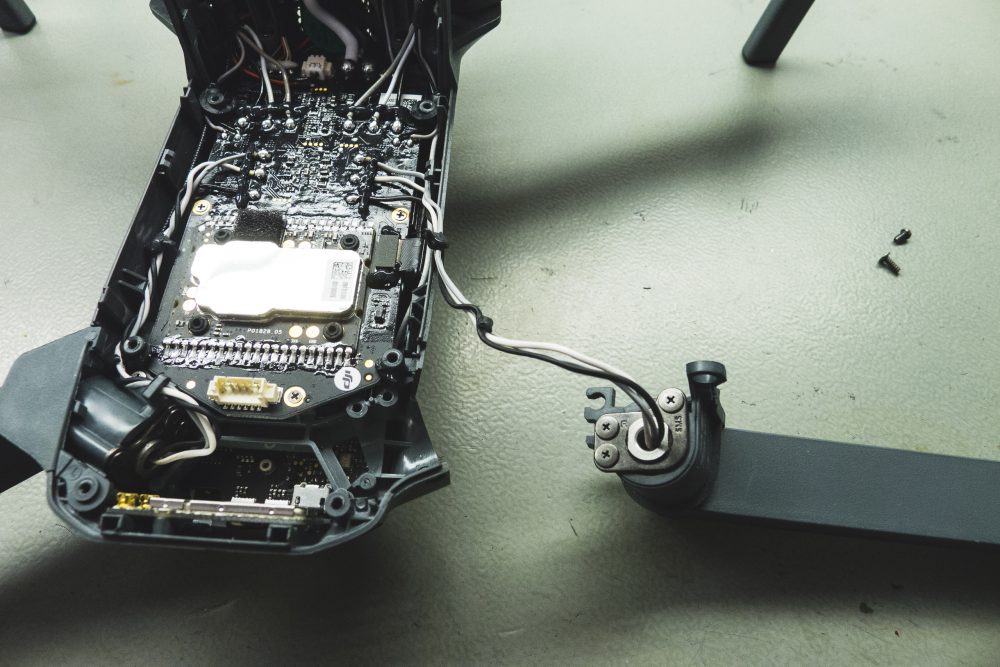
Mavic Pro leválasztott hátsó lába

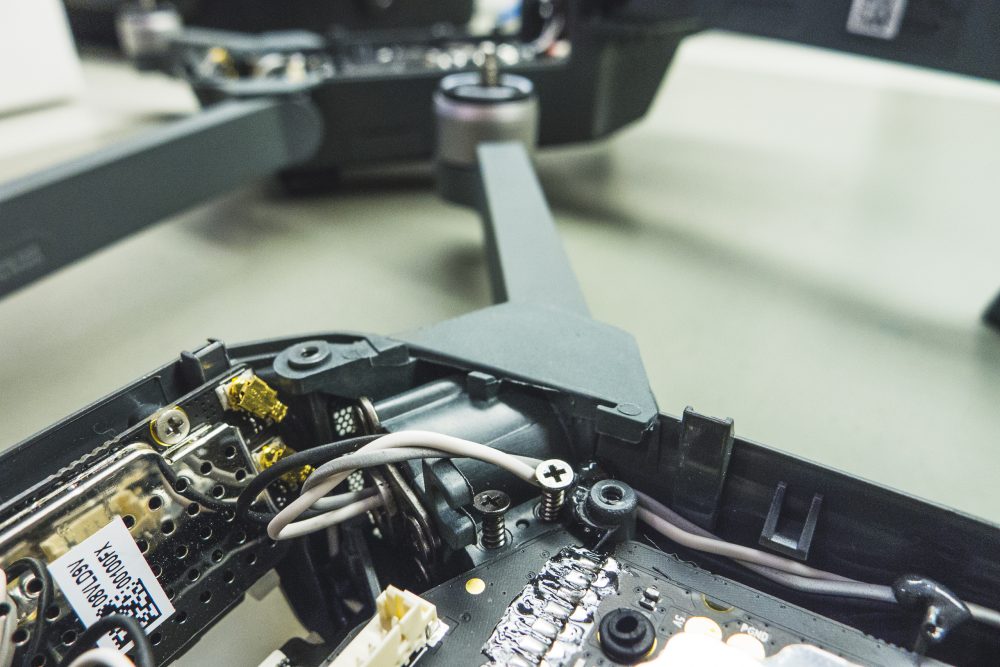
A bal láb vezetékezése csavart, a jobb lábé még egyenes
A felső burkolatba van egyébként beépítve a GPS modullal egybeépített hátsó iránytűegység. Minket azonban nem ez érdekelt, hanem a vezetékek: jól sejtettük, valóban nem voltak megcsavarva a kábelek. A kábelek megcsavarásához mintául vettünk egy másik, már későbbi gyártású Mavic Pro drónt, amiből kiderült számunkra, hogy 4-szer kell csavarodnia a vezetékeknek az útjuk során. Ezt úgy tudjuk elérni a vezetékek forrasztása nélkül legegyszerűbben, hogy a lábakat tartó 3-3 csavar kicsavarjuk, és a lábakat leemelve a vázról körbeforgatjuk a minta szerint, majd visszaillesztjük és visszacsavarozzuk a helyükre. Ezután összeépítjük a drónt, és teszteljük. Ha mindent jól csináltunk, meg kell szűnnie a váratlan pozícióvesztéseknek, legalábbis a leírt okból kifolyóknak mindenképp!
Ha Te is az itt leírt hibajelenséget tapasztalnád, keress minket bátran, szívesen megvizsgáljuk Mavic Pro-d kábelezését, hogy az optimalizált módon van-e vezetve, vagy még a régi módon. A vezetékezést gyorsan és sérülésmentesen át tudjuk alakítani az optimalizált, csavart módra.
Egy hozzászólás
[…] törött DJI Mavic Pro drón javítása Iránytű-interferencia Mavic Pro-n Miért mindig a bal hátsó lába törik a Mavic Pro-nak? DJI Spark – Gyorstalpaló DJI Spark – […]