drón

DJI Lito X1 javítása
DJI Lito X1 drón gimbal problémáját javítottuk sikerrel. Rövid beszámoló és pár észrevétel a DJI új belépő kategóriás drónjáról.

DJI Mavic 2 Thermal Enterprise Advanced hőkamerás drón javítása
Járt nálunk egy DJI Mavic 2 Thermal Enterprise Advanced hőkamerás drón, aminek pont a legértékesebb alkatrésze, a hőkamerás gimbal-kamera egysége…

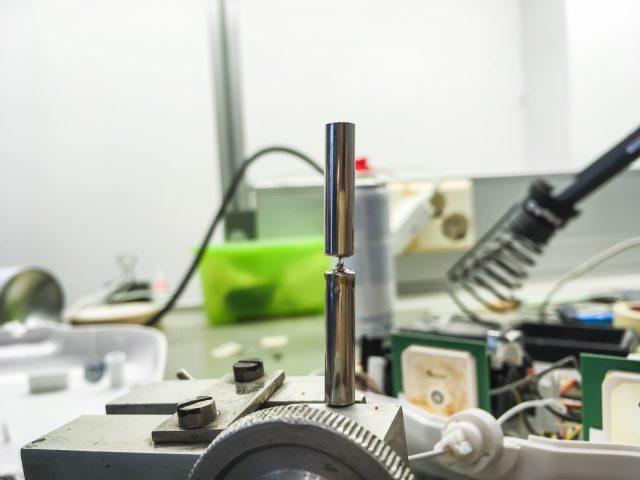
Pillantás műhelytitkainkba: Műanyaghegesztés
Egy mai munkánk kapcsán röviden bemutatom egyik érdekes megoldásunkat, amivel törött vagy repedt műanyagalkatrészeket lehet megmenteni. Mutatok néhány képet a…

Utazás a lombok között
https://youtu.be/kTs9j8PxwXA Egy kis erdei-mezei lubickolás a levegőben a saját fejlesztésű, CineWhoop kategóriájú FPV drónommal. A felvételeket Káptalanfüred határában a Köcsi-tónál…

Felcserélhetőek a Mavic Mini és Mini 2 propellerei?
Nemrég merült fel a kérdés, hogy a DJI Mavic Mini-re fel lehet-e tenni a Mini 2 propellereit? Rövid kis cikkecske…

Egykerekű őrület!
https://www.youtube.com/watch?v=LHfSQCO3H28 A felvételt az új építésű CineWhoop-unkkal vettük fel, melynek összeállításáról itt olvashatsz. Ha tetszett a videó, keresd fel YouTube…

Mavic Air 2 javítás – Karcsere
Pár napja kaptam egy Mavic Air 2-t javításra, ami a drónokhoz képest elég szokatlan módon, nem leeséstől sérült meg, hanem…

DJI Spark kameravédő üveg cseréje
A minap egy törött kameraüvegű Spark-ot kaptam javításra, gondoltam készítek pár képet a munkafolyamatról. Szerencsére a kameramodul és a kameralencse…

Ismét drónt építünk – A meztelen GoPro esete
Fejlesztettem egy új fpv drónt, ami kicsi, biztonságos, szépen repül, kis helyekre befér, és még egy GoPro-t is elvisz a…
DJI távirányítók javítása – III. rész: Sérült antenna javítása
Korábbi cikkeimben a DJI távirányítók USB-problémájáról, illetve különféle antenna-átalakításokról, jelerősítésről írtam. Most egy Phantom 3 távirányító törött antennájának a javítását…