3D nyomtatás
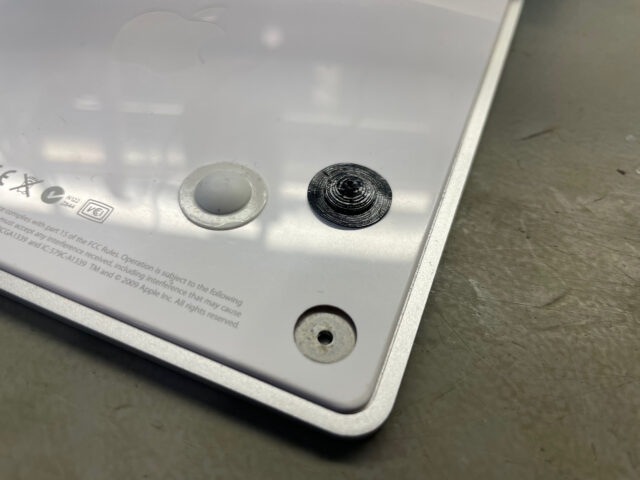
Magic Trackpad és az elszabadult talpak
Egy sok ideje húzódó, zavaró Magic Trackpad problémára találtunk most ki egy egyszerű, de mégis nagyszerű megoldást. Azért mondjuk, hogy…
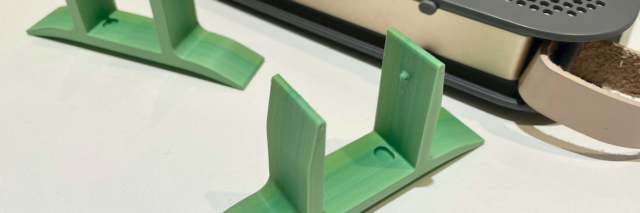
Egy felboruló Bang & Olufsen hangszóró
Van egy Bang & Olufsen hangszóró, aminél a stabilitást feláldozták a formatervezés oltárán, és nagyon könnyen felborul: ez a B&O…

Érdekel a precíziós mezőgazdálkodás? Mutatjuk, mit alkottunk!
Érdekes projekttel talált meg minket egy családi vállalkozás: A DJI Pantom 4 sorozatú drónjait (Phantom 4, Phantom 4 Pro, Phantom…
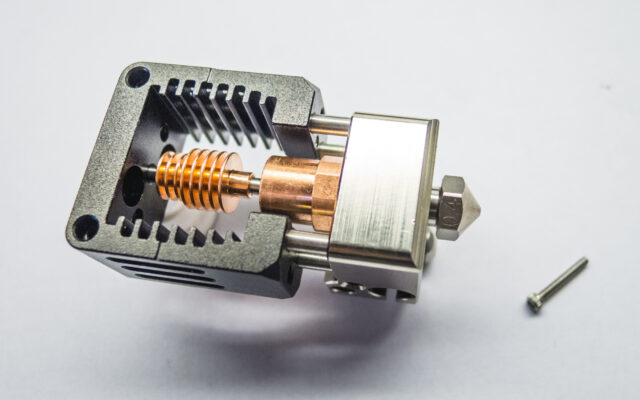
E3D » Mosquito – Kalandos hotend-átalakítás Prusa i3 MK3S nyomtatónkban
Remélhetőleg a jövőből visszatekintve is óriási fejlesztésnek fogom ítélni az elmúlt napok munkáit, és hosszú távon is elégedett leszek az…

Ismét drónt építünk – A meztelen GoPro esete
Fejlesztettem egy új fpv drónt, ami kicsi, biztonságos, szépen repül, kis helyekre befér, és még egy GoPro-t is elvisz a…

3D nyomtatás: Nyitásérzékelő Internorm KF500 ablakhoz
Távolról kezdem: egy felújítandó lakásban egy komplex otthonautomatizálási rendszert fogunk kiépíteni az elkövetkezendő hónapokban. A lakásban a padlótól a plafonig,…

3D nyomtatás: Alkatrész babakocsihoz
A minap vásároltunk egy használt Baby Jogger babakocsit, aminek volt egy apró hibája: a sportülés lábtartóját nem lehetett fel-le billenteni,…

Új kedvencem: a Repülő Fogpiszkáló
Írtam már arról, hogy mennyire megfogott az apró drónok világa. Most még mélyebbre merültem, és terveztem, majd legyártottam egy kétcellás…

Egy apró pöcök Mavic Pro-hoz
Az első generációs Mavic Pro drónok legsérülékenyebb pontja a gimbal-kamera egység. Mind a felfüggesztés, mind a három tengely mentén stabilizáló…
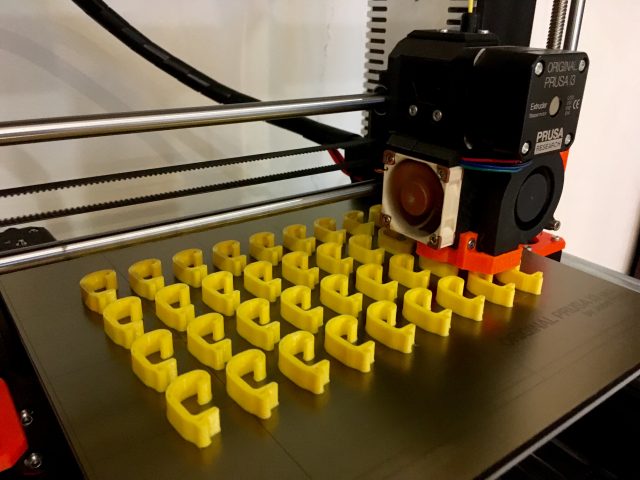
IKEA Samla doboz klipsz – ismét nyomtatunk…
Vannak olyan apró dolgok, amik megkönnyítik a mindennapjainkat, és vannak olyan dolgok, amiket egyszerűen nem értünk, hogy miért nem léteznek…